Main programm to run the transport vehicle.
More...
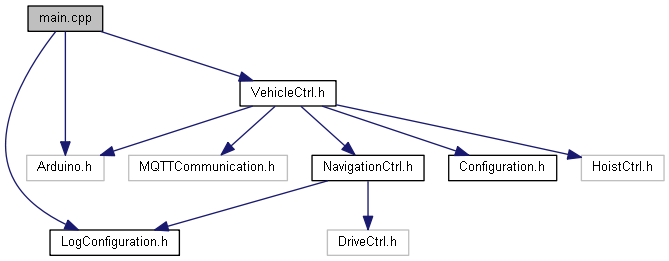
#include "Arduino.h"
#include "LogConfiguration.h"
#include "VehicleCtrl.h"
Go to the source code of this file.
|
| void | run () |
| |
| void | test_communication () |
| |
| void | test_hardware () |
| |
| void | test_ctrl () |
| |
| void | setup () |
| | For initialisation of the Board. More...
|
| |
| void | loop () |
| | After creating a setup() function, which initializes and sets the initial values, the loop() function does precisely what its name suggests, and loops consecutively, allowing your program to change and respond. Use it to actively control the board. More...
|
| |
Main programm to run the transport vehicle.
- Author
- Luca Mazzoleni (luca..nosp@m.mazz.nosp@m.oleni.nosp@m.@hsr.nosp@m..ch)
- Version
- 1.1 - Added Doxygen-Documentation - Luca Mazzoleni (luca..nosp@m.mazz.nosp@m.oleni.nosp@m.@hsr.nosp@m..ch) - 2019-03-20
-
1.0 - BA FTS FS 2018
- Date
- 2019-03-20
- Copyright
- Copyright (c) 2019
- Todo:
- Add a seperate testclass
Definition in file main.cpp.
◆ run()
◆ test_communication()
| void test_communication |
( |
| ) |
|
◆ test_hardware()
◆ test_ctrl()
◆ setup()
For initialisation of the Board.
Use it to initialize variables, pin modes, start using libraries, etc. The setup() function will only run once, after each powerup or reset of the board
Definition at line 73 of file main.cpp.
◆ loop()
After creating a setup() function, which initializes and sets the initial values, the loop() function does precisely what its name suggests, and loops consecutively, allowing your program to change and respond. Use it to actively control the board.
Definition at line 141 of file main.cpp.
◆ vehictrl
◆ currentMillis
| unsigned long currentMillis = 0 |
will store current time
Definition at line 57 of file main.cpp.
◆ previousMillis
| unsigned long previousMillis = 0 |
will store last time
Definition at line 58 of file main.cpp.
◆ FuncFPtr
| void(* FuncFPtr) (void) = &loop |