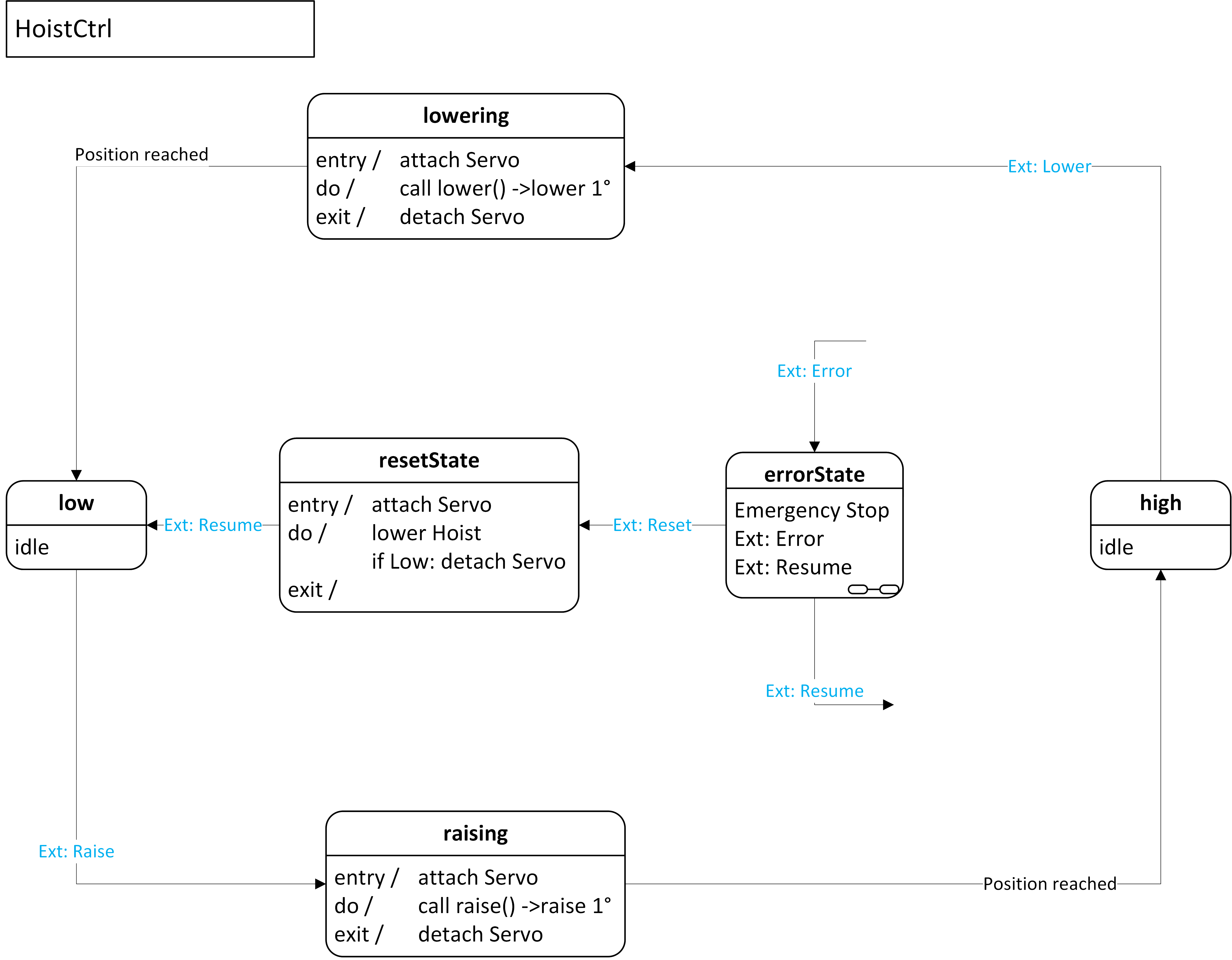
Contains the FSM for the Hoist. More...
#include <HoistCtrl.h>
Public Types | |
| enum | Event { Event::Raise, Event::Lower, Event::PosReached, Event::Error, Event::Resume, Event::Reset, Event::NoEvent } |
| Enum holds all possible events. More... | |
| enum | State { State::low, State::raising, State::high, State::lowering, State::resetState, State::errorState } |
| Enum holds all possible states for the Hoist. More... | |
Public Member Functions | |
| HoistCtrl () | |
| Construct a new Hoist Ctrl object and initailize the currentState with low state. More... | |
| void | loop () |
| Calls the do-function of the active state and hence generates Events. More... | |
| void | loop (Event currentEvent) |
| Procceses the current Event and calls the do-function of the active state. More... | |
| const State | getcurrentState () |
| Get the current State. More... | |
Private Member Functions | |
| void | process (Event e) |
| changes the state of the FSM based on the event More... | |
| void | entryAction_low () |
| executes the entry action of the low state. More... | |
| HoistCtrl::Event | doAction_low () |
| executes the main action of the low state. More... | |
| void | exitAction_low () |
| executes the exit action of the low state. More... | |
| void | entryAction_raising () |
| executes the entry action of the raising state. More... | |
| HoistCtrl::Event | doAction_raising () |
| executes the main action of the raising state. More... | |
| void | exitAction_raising () |
| executes the exit action of the raising state. More... | |
| void | entryAction_high () |
| executes the entry action of the high state. More... | |
| HoistCtrl::Event | doAction_high () |
| executes the main action of the high state. More... | |
| void | exitAction_high () |
| executes the exit action of the high state. More... | |
| void | entryAction_lowering () |
| executes the entry action of the lowering state. More... | |
| HoistCtrl::Event | doAction_lowering () |
| executes the main action of the lowering state. More... | |
| void | exitAction_lowering () |
| executes the exit action of the lowering state. More... | |
| void | entryAction_errorState () |
| entry action of the errorState state. More... | |
| HoistCtrl::Event | doAction_errorState () |
| main action of the errorState state. More... | |
| void | exitAction_errorState () |
| exit action of the errorState state. More... | |
| void | entryAction_resetState () |
| entry action of the resetState More... | |
| HoistCtrl::Event | doAction_resetState () |
| main action of the resetState More... | |
| void | exitAction_resetState () |
| exit action of the resetState More... | |
| String | decodeState (State state) |
| Decodes the State-Enum and returns a description. More... | |
| String | decodeEvent (Event event) |
| Decodes the Event-Enum and returns a description. More... | |
Private Attributes | |
| State | lastStateBevorError |
| holds the last state of the FSM so it's possible to resume after error More... | |
| State | currentState |
| holds the current state of the FSM More... | |
| Event | currentEvent |
| holds the current event of the FSM More... | |
| Event(HoistCtrl::* | doActionFPtr )(void) = nullptr |
| Functionpointer to call the current states do-function. More... | |
| Hoist | pHoist = Hoist(HOIST_SERVO_PIN, HOIST_SERVO_DELAY, HOIST_POISITION_MAX, HOIST_POSITION_MIN) |
| Hoist Object. More... | |
Detailed Description
Member Enumeration Documentation
◆ Event
|
strong |
Enum holds all possible events.
Definition at line 34 of file HoistCtrl.h.
◆ State
|
strong |
Enum holds all possible states for the Hoist.
| Enumerator | |
|---|---|
| low | low State |
| raising | raising State |
| high | high State |
| lowering | lowering State |
| resetState | reset state |
| errorState | error State |
Definition at line 47 of file HoistCtrl.h.
Constructor & Destructor Documentation
◆ HoistCtrl()
| HoistCtrl::HoistCtrl | ( | ) |
Construct a new Hoist Ctrl object and initailize the currentState with low state.
Definition at line 16 of file HoistCtrl.cpp.
Member Function Documentation
◆ loop() [1/2]
| void HoistCtrl::loop | ( | ) |
Calls the do-function of the active state and hence generates Events.
Definition at line 19 of file HoistCtrl.cpp.
◆ loop() [2/2]
| void HoistCtrl::loop | ( | Event | currentEvent | ) |
Procceses the current Event and calls the do-function of the active state.
- Parameters
-
currentEvent - Event
Definition at line 24 of file HoistCtrl.cpp.
◆ getcurrentState()
| const HoistCtrl::State HoistCtrl::getcurrentState | ( | ) |
◆ process()
|
private |
changes the state of the FSM based on the event
This Functions switchs the state based on the occuring events
- Parameters
-
e - Event
Definition at line 34 of file HoistCtrl.cpp.
◆ entryAction_low()
|
private |
executes the entry action of the low state.
Definition at line 110 of file HoistCtrl.cpp.
◆ doAction_low()
|
private |
executes the main action of the low state.
This is an idle-state. Return NoEvent.
- Returns
- HoistCtrl::Event - generated Event
Definition at line 117 of file HoistCtrl.cpp.
◆ exitAction_low()
|
private |
executes the exit action of the low state.
Definition at line 123 of file HoistCtrl.cpp.
◆ entryAction_raising()
|
private |
executes the entry action of the raising state.
Attach Servo.
Definition at line 128 of file HoistCtrl.cpp.
◆ doAction_raising()
|
private |
executes the main action of the raising state.
Raise the Hoist till the Endposition is reached and generate an PosReached Event. Else return NoEvent.
- Returns
- HoistCtrl::Event - generated Event
Definition at line 136 of file HoistCtrl.cpp.
◆ exitAction_raising()
|
private |
executes the exit action of the raising state.
Detach Servo.
Definition at line 145 of file HoistCtrl.cpp.
◆ entryAction_high()
|
private |
executes the entry action of the high state.
Definition at line 151 of file HoistCtrl.cpp.
◆ doAction_high()
|
private |
executes the main action of the high state.
This is an idle-state. Return NoEvent.
- Returns
- HoistCtrl::Event - generated Event
Definition at line 158 of file HoistCtrl.cpp.
◆ exitAction_high()
|
private |
executes the exit action of the high state.
Definition at line 164 of file HoistCtrl.cpp.
◆ entryAction_lowering()
|
private |
executes the entry action of the lowering state.
Attach Servo.
Definition at line 169 of file HoistCtrl.cpp.
◆ doAction_lowering()
|
private |
executes the main action of the lowering state.
Lower the hoist till the lowposition is reached and then generate the event PosReached. else return NoEvent.
- Returns
- HoistCtrl::Event - generated Event
Definition at line 177 of file HoistCtrl.cpp.
◆ exitAction_lowering()
|
private |
executes the exit action of the lowering state.
Detache the Servo.
Definition at line 186 of file HoistCtrl.cpp.
◆ entryAction_errorState()
|
private |
entry action of the errorState state.
Definition at line 192 of file HoistCtrl.cpp.
◆ doAction_errorState()
|
private |
main action of the errorState state.
- Returns
- HoistCtrl::Event - generated Event
Definition at line 200 of file HoistCtrl.cpp.
◆ exitAction_errorState()
|
private |
exit action of the errorState state.
Definition at line 206 of file HoistCtrl.cpp.
◆ entryAction_resetState()
|
private |
◆ doAction_resetState()
|
private |
main action of the resetState
lower the hoist and then detach the servo
- Returns
- DriveCtrl::Event - generated Event
Definition at line 218 of file HoistCtrl.cpp.
◆ exitAction_resetState()
|
private |
exit action of the resetState
Definition at line 227 of file HoistCtrl.cpp.
◆ decodeState()
|
private |
Decodes the State-Enum and returns a description.
- Parameters
-
state - enum State
- Returns
- String - State as String
Definition at line 233 of file HoistCtrl.cpp.
◆ decodeEvent()
|
private |
Decodes the Event-Enum and returns a description.
- Parameters
-
event - enum Event
- Returns
- String - Event as String
Definition at line 258 of file HoistCtrl.cpp.
Member Data Documentation
◆ lastStateBevorError
|
private |
holds the last state of the FSM so it's possible to resume after error
Definition at line 84 of file HoistCtrl.h.
◆ currentState
|
private |
holds the current state of the FSM
Definition at line 85 of file HoistCtrl.h.
◆ currentEvent
|
private |
holds the current event of the FSM
Definition at line 86 of file HoistCtrl.h.
◆ doActionFPtr
|
private |
Functionpointer to call the current states do-function.
https://stackoverflow.com/questions/1485983/calling-c-class-methods-via-a-function-pointer
Definition at line 93 of file HoistCtrl.h.
◆ pHoist
|
private |
Hoist Object.
Definition at line 95 of file HoistCtrl.h.
The documentation for this class was generated from the following files:
